↑ RobotChess
Page Created: 6/25/2014 Last Modified: 10/8/2020 Last Generated: 7/27/2026

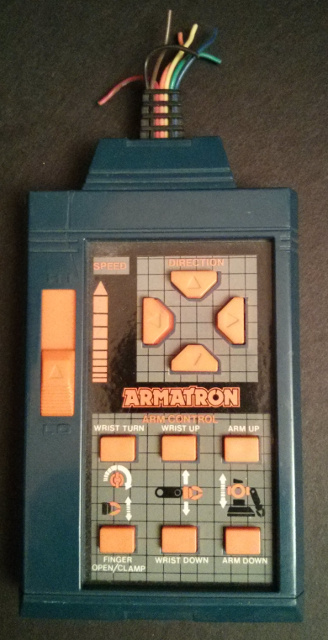
In 1988, when I was 18, I built by own talking, voice-controlled robot by interfacing a Radio Shack Mobile Robot Arm with a Commodore64, Covox Voice Master Jr., and a General Instruments SPO256-AL2 speech synthesizer chip.
Essentially, I cut off the wired controller...
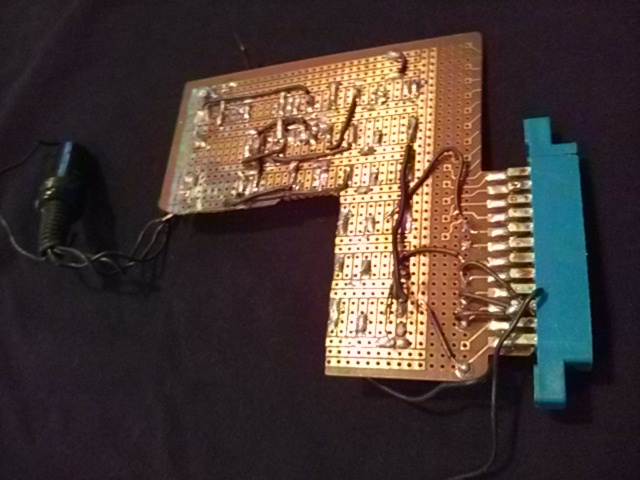
...and soldered a set of bipolar junction transistors and reed relays to a board connected to the computer's expansion port, and then I wired it into the arm's motors.
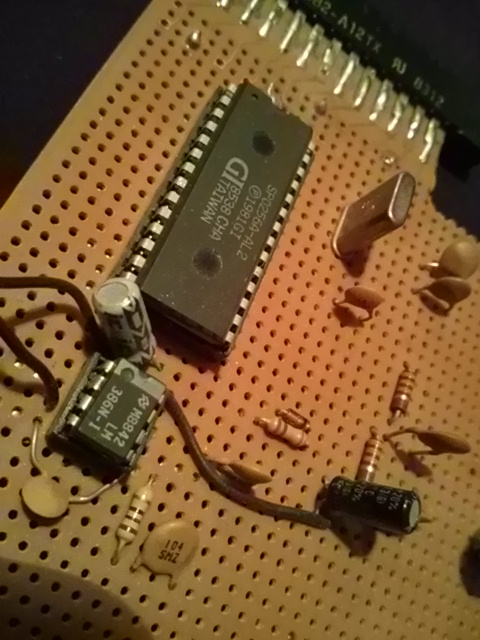
I also interfaced this speech chip:
Then I devised and programmed a voice menu for interacting with the robot.
I'd start by saying "Robot, Robot, Robot" to activate it.
The robot would speak back with "Robot Activated."
It was an open-loop robot, with no motor feedback, so I had to use clever timing.
However, if the robot drove too close to the microphone, the motor noise would interfere with voice recognition, so my shouts of "Stop! Stop!" would be ignored, and it would run into various things.

The Voice Master Jr. was "template" based and had to be trained. It had no form of noise cancellation.
A few months later, in 1989, I expanded on this by having it respond to joystick control and record the movements in an array with respect to Time, so I could playback its movements. So I would drive it to pick up chess pieces, then drive it back to a "starting" state, press a key, and it would move the chess piece into position.
You can see my old diagrams here.
I later cannibalized my circuit board for other projects such as ThePhoneSystem, but this taught me a lot about robotics and computer-controlled electronics that I used in future projects. Here is what is left of the original control board:
I am currently working on new RobotDesigns .
Comments